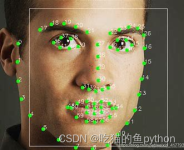
针对传统摄像机标定算法中摄像机内外参数与镜头畸变之间存在耦合,提出了一种将镜头畸变从摄像机参数中分离出来单独求解的算法。算法基于“三维空间中的直线经过遵循透视模型的相机投影,在相机平面上仍是直线”这一...
”机器视觉 摄像机标 非量测方 畸变校正 非线性优 machine v camera ca non-metri distortio nonlinear“ 的搜索结果
为此,利用不同视角采集图像上同名像点共面的基本原理,推导包含非线性畸变模型的共面条件方程,并采用最小二乘解的广义逆法求解非线性畸变参数,确保摄像机的自校正精度;因无需加工和维护成本很高的精密标定板,也...
提出了一种畸变中心未知的非量测摄像机畸变标定新方法,该方法无须求解摄像机内外线性参数即可标定摄像机二阶多项式径向畸变校正模型。该方法分两步实现:将直线畸变成像的曲线的两个端点用直线段连接以形成闭合曲线...
根据三维空间中的直线投影到图像平面也是直线的原理,提出了一种基于直线特征的摄像机非线性畸变校正方法。实验表明:随着直线条数的增加,当直线在CCD 上的分布均匀后,解得的非线性畸变参数稳定、正确。此方法既不...



通过使用图像特征,如直线等几何不变性,并基于场景中的直线经过透视投影变换后所成的图像仍是直线的事实... 可量测的非线性摄像机镜头畸变校正方法(下简称为RMC方法),可以被看成是分为两个过程:畸变模板校正...



https://blog.csdn.net/qq_28514991/article/details/88559590 https://blog.csdn.net/baidu_38172402/article/details/81949447 ... 文章目录1 摄像机标定1.1 四大坐标...






非线性系统、扩展卡尔曼滤波器

对摄像机参数标定是三维定位的关键。立体视觉系统是工业化生产的关键技术,为了准确定位,摄像机必须标定。标定的方法主要有线性标定与非线性标定。这里提出采用由粗到精,实现精确标定,补偿相机畸变。
详细介绍开源计算机视觉库OpenCV。
OpenCV是一个开源计算机视觉库,提供了许多用于图像处理和计算机视觉任务的函数和工具。OpenCV 4.0是最新版本,它提供了许多新的功能和改进。Python是一种流行的编程语言,具有简单易学的语法和丰富的库支持。使用...
需求分析:一个项目主要包含①定位、识别②缺陷检测③OCR字符识别④测量类的项目这四个大方向 方案设计:根据客户应用的场合不同,选择相应的镜头、相机、支架、光源及如何打光等 概要设计:软件架构体系,vc++...

在双目立体视觉中,常常会使用张正友的相机标定方法,得到相机的参数(相机内参和畸变),进而矫正由于相机透镜制造工艺等因素造成的图像畸变。在Opencv 和 Matlab 中都有封装好的函数或者标定工具箱供我们使用,...
推荐文章
- Android开发:设置背景图片_c#andriod 背景图-程序员宅基地
- 网络通信技术-程序员宅基地
- 简单的学生成绩管理系统(数组实现)_为什么用数组做成绩管理系统他的成绩只显示3和个数组-程序员宅基地
- 基于Python的信用评分卡模型-give me some credit数据集,AUC 0.93 KS 0.71-程序员宅基地
- 基于servlet+jsp 的 java 简单版商城项目_jsp servlet maven商城-程序员宅基地
- 安装php_soap.dll,php如何安装soap扩展-程序员宅基地
- 【MybatisPlus 学习】配置多数据源_mybatisplus同一个方法里操作两个数据源-程序员宅基地
- 用Keil仿真查看PWM输出_keil5如何仿真pwm输出-程序员宅基地
- 【基基基础】什么?你连软件都还没下载?!手把手教你下载VS/Dev-C++,写出属于自己的第一个C语言代码_vs dev-c++-程序员宅基地
- 口述历史:Andrew Viterbi-程序员宅基地